Yaw Steering for Solar Power Optimisation¶
Demonstrates the effect of yaw steering on solar power generation.
Scenario
450 km circular orbit, 50° inclination, nadir-pointed
Single deployed solar panel: 5 m² active area, normal direction (1, 0, −1) in body frame
30% solar-to-DC efficiency
Comparison: fixed nadir attitude vs yaw steering
[1]:
import numpy as np
import matplotlib.pyplot as plt
from missiontools import Spacecraft, FixedAttitudeLaw, NormalVectorSolarConfig
1. Spacecraft and solar panel setup¶
[2]:
EPOCH = np.datetime64('2025-03-20T12:00:00', 'us')
PANEL_AREA = 5.0 # m² gross
FILL_FACTOR = 0.95
EFFICIENCY = 0.30
PANEL_NORMAL = [1, 0, -1] # body frame (normalised internally)
active_area = PANEL_AREA * FILL_FACTOR
print(f"Panel gross area : {PANEL_AREA:.1f} m\u00b2")
print(f"Active cell area : {active_area:.2f} m\u00b2")
print(f"Panel normal : {PANEL_NORMAL}")
print(f"Efficiency : {EFFICIENCY:.0%}")
Panel gross area : 5.0 m²
Active cell area : 4.75 m²
Panel normal : [1, 0, -1]
Efficiency : 30%
[3]:
sc_static = Spacecraft(
a = (6_371_000 + 450_000), # 450 km altitude
e = 0.0,
i = np.radians(50.0),
raan = 0.0,
arg_p = 0.0,
ma = 0.0,
epoch = EPOCH,
)
cfg_static = NormalVectorSolarConfig(
normal_vecs=[PANEL_NORMAL],
areas=[active_area],
efficiency=EFFICIENCY,
)
sc_static.add_solar_config(cfg_static)
mu = sc_static.central_body_mu
period_s = 2 * np.pi * np.sqrt(sc_static.a**3 / mu)
period = np.timedelta64(int(period_s * 1e6), 'us')
print(f"Altitude : 450 km")
print(f"Inclination : 50.0\u00b0")
print(f"Orbital period : {period_s / 60:.1f} min")
Altitude : 450 km
Inclination : 50.0°
Orbital period : 93.4 min
2. Static attitude — power over one orbit¶
[4]:
result_static = cfg_static.generation(EPOCH, EPOCH + period, np.timedelta64(10, 's'))
oap_static = cfg_static.oap()
print(f"OAP (static) : {oap_static:.2f} W")
print(f"Peak power : {result_static['power'].max():.2f} W")
OAP (static) : 596.12 W
Peak power : 1946.52 W
3. Yaw steering — power over one orbit¶
[5]:
# Build a second spacecraft with yaw steering enabled
sc_yaw = Spacecraft(
a = sc_static.a,
e = 0.0,
i = np.radians(50.0),
raan = 0.0,
arg_p = 0.0,
ma = 0.0,
epoch = EPOCH,
)
cfg_yaw = NormalVectorSolarConfig(
normal_vecs=[PANEL_NORMAL],
areas=[active_area],
efficiency=EFFICIENCY,
)
sc_yaw.add_solar_config(cfg_yaw)
sc_yaw.attitude_law.yaw_steering(cfg_yaw)
result_yaw = cfg_yaw.generation(EPOCH, EPOCH + period, np.timedelta64(10, 's'))
oap_yaw = cfg_yaw.oap()
print(f"OAP (yaw steering): {oap_yaw:.2f} W")
print(f"Peak power : {result_yaw['power'].max():.2f} W")
OAP (yaw steering): 1004.05 W
Peak power : 1946.55 W
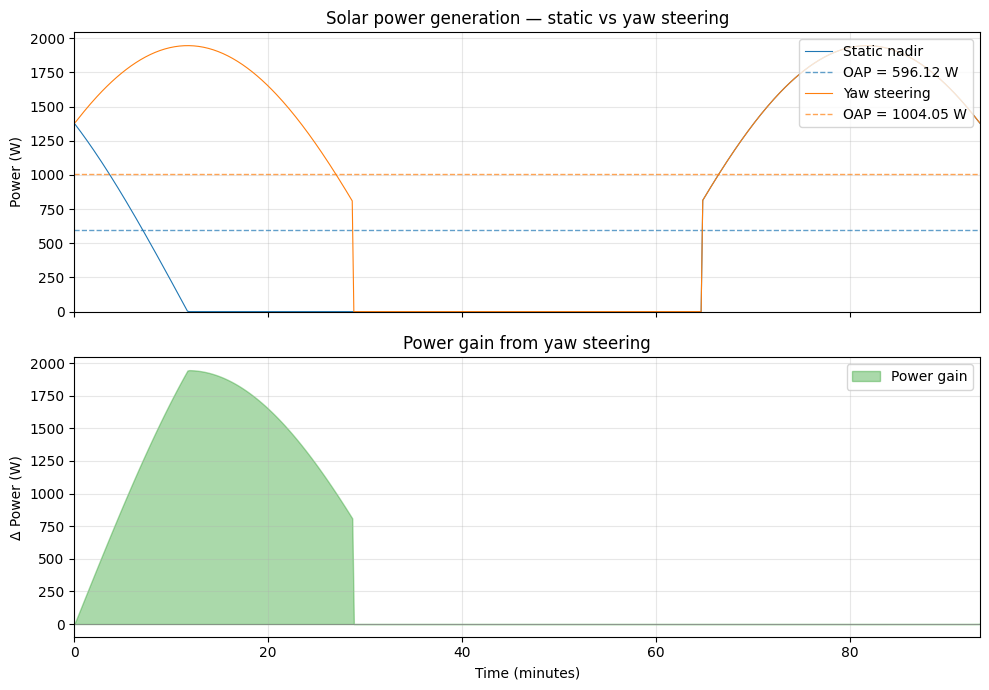
4. Comparison plots¶
[6]:
elapsed_static = (result_static['t'] - result_static['t'][0]) / np.timedelta64(1, 'm')
elapsed_yaw = (result_yaw['t'] - result_yaw['t'][0]) / np.timedelta64(1, 'm')
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(10, 7), sharex=True)
# --- Individual curves ---
ax1.plot(elapsed_static, result_static['power'], linewidth=0.8, color='tab:blue', label='Static nadir')
ax1.axhline(oap_static, color='tab:blue', linestyle='--', linewidth=1, alpha=0.7,
label=f'OAP = {oap_static:.2f} W')
ax1.plot(elapsed_yaw, result_yaw['power'], linewidth=0.8, color='tab:orange', label='Yaw steering')
ax1.axhline(oap_yaw, color='tab:orange', linestyle='--', linewidth=1, alpha=0.7,
label=f'OAP = {oap_yaw:.2f} W')
ax1.set_ylabel('Power (W)')
ax1.set_title('Solar power generation \u2014 static vs yaw steering')
ax1.legend(loc='upper right')
ax1.set_ylim(bottom=0)
ax1.grid(True, alpha=0.3)
# --- Power gain ---
gain = result_yaw['power'] - result_static['power']
ax2.fill_between(elapsed_yaw, gain, alpha=0.4, color='tab:green', label='Power gain')
ax2.axhline(0, color='grey', linewidth=0.5)
ax2.set_xlabel('Time (minutes)')
ax2.set_ylabel('\u0394 Power (W)')
ax2.set_title('Power gain from yaw steering')
ax2.legend()
ax2.set_xlim(0, elapsed_yaw[-1])
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
5. Summary¶
[7]:
improvement = (oap_yaw / oap_static - 1) * 100
print('=' * 50)
print('Yaw steering summary')
print('=' * 50)
print(f"{'':25} {'Static':>12} {'Yaw':>12}")
print('-' * 50)
print(f"{'OAP (W)':25} {oap_static:>12.2f} {oap_yaw:>12.2f}")
print(f"{'Peak power (W)':25} {result_static['power'].max():>12.2f} {result_yaw['power'].max():>12.2f}")
print(f"{'OAP improvement':25} {'+' + f'{improvement:.1f}':>12}%")
==================================================
Yaw steering summary
==================================================
Static Yaw
--------------------------------------------------
OAP (W) 596.12 1004.05
Peak power (W) 1946.52 1946.55
OAP improvement +68.4%