Conditional Coverage — Nadir Imaging with Ground-Station Tracking¶
Demonstrates the conditions feature in missiontools.
The spacecraft normally images in nadir-pointing mode, but when it comes within view of a ground station it stops imaging and reorients to track the station with its body X+ face (e.g. for a downlink antenna).
This is implemented using:
``ConditionAttitudeLaw`` — routes between two attitude laws based on a
SpaceGroundAccessConditionSensor ``condition`` — a
NotConditionthat disables the sensor when the ground station is in view
Scenario
550 km sun-synchronous orbit, LTAN 10:30
Nadir-pointed conic sensor, 15° half-angle (active only when GS is not visible)
Ground station: Svalbard (78.2°N, 15.6°E), el_min_deg = 5°
Area of interest: EU region
Analysis window: 10 days
[10]:
import numpy as np
import matplotlib.pyplot as plt
from missiontools import (
Spacecraft, ConicSensor, AoI, Coverage, GroundStation,
FixedAttitudeLaw, TrackAttitudeLaw, ConditionAttitudeLaw,
SpaceGroundAccessCondition, NotCondition,
)
1. Spacecraft and Ground Station¶
[11]:
EPOCH = np.datetime64('2025-06-01T00:00:00', 'us')
sc = Spacecraft.sunsync(
altitude_km=550.0,
node_solar_time='10:30',
epoch=EPOCH,
)
gs = GroundStation(lat=78.2, lon=15.6)
period_s = 2 * np.pi * np.sqrt(sc.a**3 / sc.central_body_mu)
print(f"Altitude : {(sc.a - sc.central_body_radius) / 1e3:.0f} km")
print(f"Inclination : {np.degrees(sc.i):.2f}°")
print(f"Orbital period : {period_s / 60:.1f} min")
print(f"Ground station : Svalbard ({gs.lat}°N, {gs.lon}°E)")
Altitude : 550 km
Inclination : 97.59°
Orbital period : 95.6 min
Ground station : Svalbard (78.2°N, 15.6°E)
2. Conditional Attitude Law¶
The attitude law selects between two modes:
Default (nadir):
FixedAttitudeLaw.nadir()— body-z points at Earth centre; used when the spacecraft is not in view of Svalbard.GS tracking:
TrackAttitudeLaw(gs)— body-z points at the ground station; used whenSpaceGroundAccessConditionis true.
In a real mission, the tracking law would orient the body-X face (where the downlink antenna is mounted) toward the station. Here we use TrackAttitudeLaw to point body-z at the station, which demonstrates the mechanism clearly.
[12]:
nadir_law = FixedAttitudeLaw.nadir()
track_law = TrackAttitudeLaw(gs)
gs_visible = SpaceGroundAccessCondition(sc, gs, el_min_deg=5.0)
attitude_law = ConditionAttitudeLaw(
default_attitude=nadir_law,
condition_attitudes=[(gs_visible, track_law)],
)
sc.attitude_law = attitude_law
print(f"Attitude law : {attitude_law}")
Attitude law : ConditionAttitudeLaw(default=FixedAttitudeLaw(frame='lvlh', boresight=[-1. 0. 0.]), branches=[(SpaceGroundAccessCondition(spacecraft=Spacecraft(a=6928137.0, e=0.0, i=1.7033142931462117, raan=0.8148686612074731, arg_p=0.0, ma=np.float64(0.0), epoch=datetime.datetime(2025, 6, 1, 0, 0), propagator_type='j2', central_body_mu=398600441800000.0, central_body_j2=1.75553e+25, central_body_radius=6378137.0), ground_station=GroundStation(lat=78.2, lon=15.6, alt=0.0), el_min_deg=5.0), TrackAttitudeLaw(target=GroundStation(lat=78.2, lon=15.6, alt=0.0)))])
3. Sensor with Conditional Activation¶
The sensor is a 15° half-angle conic sensor pointing along body-z (nadir when in default mode). It carries a NotCondition wrapping the same ground-station visibility predicate, so it only collects imagery when the spacecraft is not tracking the ground station.
[13]:
sensor = ConicSensor(
15.0,
body_vector=[0, 0, 1],
condition=~gs_visible,
)
sc.add_sensor(sensor)
print(f"Sensor : {sensor}")
print(f"Sensor condition: {sensor.condition}")
Sensor : ConicSensor(half_angle_deg=15.000, mode='body', body_vector=[0.0, 0.0, 1.0], condition=NotCondition(SpaceGroundAccessCondition(spacecraft=Spacecraft(a=6928137.0, e=0.0, i=1.7033142931462117, raan=0.8148686612074731, arg_p=0.0, ma=np.float64(0.0), epoch=datetime.datetime(2025, 6, 1, 0, 0), propagator_type='j2', central_body_mu=398600441800000.0, central_body_j2=1.75553e+25, central_body_radius=6378137.0), ground_station=GroundStation(lat=78.2, lon=15.6, alt=0.0), el_min_deg=5.0)))
Sensor condition: NotCondition(SpaceGroundAccessCondition(spacecraft=Spacecraft(a=6928137.0, e=0.0, i=1.7033142931462117, raan=0.8148686612074731, arg_p=0.0, ma=np.float64(0.0), epoch=datetime.datetime(2025, 6, 1, 0, 0), propagator_type='j2', central_body_mu=398600441800000.0, central_body_j2=1.75553e+25, central_body_radius=6378137.0), ground_station=GroundStation(lat=78.2, lon=15.6, alt=0.0), el_min_deg=5.0))
4. Area of Interest and Coverage Setup¶
We use a bounding box which covers Europe and a 10-day analysis window.
[14]:
POINT_DENSITY = 5_000 # km² per sample point
aoi = AoI.from_region(
lat_min_deg = 27.0,
lat_max_deg = 72.0,
lon_min_deg = -32.0,
lon_max_deg = 45.0,
point_density = POINT_DENSITY,
)
T_START = EPOCH
T_END = EPOCH + np.timedelta64(10 * 86_400, 's')
cov = Coverage(aoi, [sensor], el_min_deg=10.0)
print(f"AoI points : {len(aoi)}")
print(f"Window : 10 days")
AoI points : 7050
Window : 10 days
5. Coverage Results¶
[15]:
print("Computing coverage fraction ...")
frac = cov.coverage_fraction(T_START, T_END, max_step=np.timedelta64(10, 's'))
print(f" Final cumulative coverage : {frac['final_cumulative']:.1%}")
print(f" Mean instantaneous : {frac['mean_fraction']:.1%}")
print("\nComputing revisit times ...")
rev = cov.revisit_time(T_START, T_END, max_step=np.timedelta64(10, 's'))
global_mean_hrs = rev['global_mean'] / 3600.0
global_max_hrs = rev['global_max'] / 3600.0
print(f" Global mean revisit : {global_mean_hrs:.1f} h")
print(f" Global max revisit : {global_max_hrs:.1f} h")
Computing coverage fraction ...
Final cumulative coverage : 58.3%
Mean instantaneous : 0.0%
Computing revisit times ...
Global mean revisit : 24.8 h
Global max revisit : 225.9 h
6. Ground-Station Access Intervals¶
Show when the ground station is visible, which are the intervals where imaging is suspended and the spacecraft tracks the station.
[16]:
passes = gs.access(sc, T_START, T_END, el_min_deg=5.0)
print(f"Ground-station passes over 10 days: {len(passes)}")
print()
for i, (t0, t1) in enumerate(passes[:10]):
dur_min = (t1 - t0) / np.timedelta64(60, 's')
print(f" Pass {i+1:>2}: {str(t0)[:19]} — {str(t1)[:19]} ({dur_min:.1f} min)")
if len(passes) > 10:
print(f" ... and {len(passes) - 10} more passes")
Ground-station passes over 10 days: 134
Pass 1: 2025-06-01T01:10:57 — 2025-06-01T01:18:14 (7.3 min)
Pass 2: 2025-06-01T02:46:04 — 2025-06-01T02:55:05 (9.0 min)
Pass 3: 2025-06-01T04:21:07 — 2025-06-01T04:30:56 (9.8 min)
Pass 4: 2025-06-01T05:56:00 — 2025-06-01T06:05:57 (9.9 min)
Pass 5: 2025-06-01T07:30:42 — 2025-06-01T07:40:28 (9.8 min)
Pass 6: 2025-06-01T09:05:09 — 2025-06-01T09:14:48 (9.7 min)
Pass 7: 2025-06-01T10:39:30 — 2025-06-01T10:49:15 (9.8 min)
Pass 8: 2025-06-01T12:14:00 — 2025-06-01T12:23:57 (9.9 min)
Pass 9: 2025-06-01T13:49:03 — 2025-06-01T13:58:51 (9.8 min)
Pass 10: 2025-06-01T15:24:55 — 2025-06-01T15:33:54 (9.0 min)
... and 124 more passes
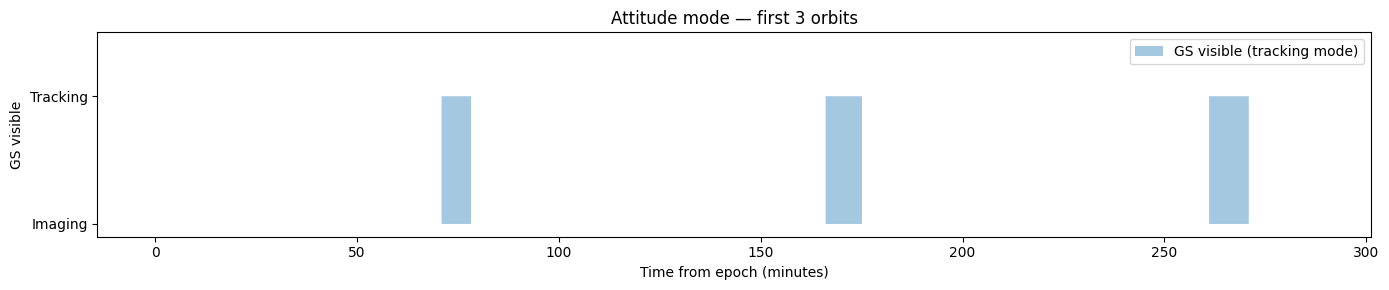
7. Attitude Mode Timeline¶
Plot the GS visibility condition over the first 3 orbits to visualise when the spacecraft switches between imaging and tracking modes.
[17]:
t_first3 = T_START + np.arange(
0, 3 * period_s, 10,
).astype('timedelta64[s]')
t_rel_min = (t_first3 - T_START) / np.timedelta64(60, 's')
vis = gs_visible.at(t_first3).astype(float)
fig, ax = plt.subplots(figsize=(14, 3))
ax.fill_between(t_rel_min, vis, step='mid', alpha=0.4,
label='GS visible (tracking mode)')
ax.set_ylabel('GS visible')
ax.set_xlabel('Time from epoch (minutes)')
ax.set_yticks([0, 1])
ax.set_yticklabels(['Imaging', 'Tracking'])
ax.set_ylim(-0.1, 1.5)
ax.set_title('Attitude mode — first 3 orbits')
ax.legend(loc='upper right')
plt.tight_layout()
plt.show()
8. Summary¶
[19]:
print("=" * 60)
print("10-day conditional coverage — European region")
print("550 km SSO LTAN 10:30 | 15° sensor | Svalbard GS (78.2°N)")
print("=" * 60)
print(f"Cumulative coverage fraction : {frac['final_cumulative']:.1%}")
print(f"Mean instantaneous coverage : {frac['mean_fraction']:.1%}")
print(f"Global mean revisit time : {global_mean_hrs:.1f} h")
print(f"Global max revisit time : {global_max_hrs:.1f} h")
print(f"Ground-station passes : {len(passes)}")
total_track_min = sum((t1 - t0) / np.timedelta64(60, 's') for t0, t1 in passes)
print(f"Total tracking time : {total_track_min:.0f} min ({total_track_min / 60:.1f} h)")
print(f"Tracking duty cycle : {total_track_min / (10 * 1440):.2%}")
print("=" * 60)
============================================================
10-day conditional coverage — European region
550 km SSO LTAN 10:30 | 15° sensor | Svalbard GS (78.2°N)
============================================================
Cumulative coverage fraction : 58.3%
Mean instantaneous coverage : 0.0%
Global mean revisit time : 24.8 h
Global max revisit time : 225.9 h
Ground-station passes : 134
Total tracking time : 1105 min (18.4 h)
Tracking duty cycle : 7.67%
============================================================
[ ]: