Canada Coverage Analysis¶
End-to-end demonstration of missiontools coverage and plotting features, using a rectangular (pushbroom-style) sensor.
Scenario
Sun-synchronous orbit, 550 km, 10:30 LTAN (ascending)
Nadir-pointed rectangular sensor, 5° cross-track × 30° along-track half-angles
Min ground elevation: 20°
Illumination constraint: solar zenith angle < 70° (daytime)
Area of interest: Canada (20 000 km² point density)
Simulation window: 90 days
[1]:
import numpy as np
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
from missiontools import Spacecraft, RectangularSensor, AoI, Coverage
from missiontools.plotting import plot_ground_track, plot_coverage_map
1. Build the spacecraft¶
[2]:
EPOCH = np.datetime64('2025-05-01T00:00:00', 'us')
sc = Spacecraft.sunsync(
altitude_km=550.0,
node_solar_time='10:30',
epoch=EPOCH,
)
print(f"Semi-major axis : {sc.a/1e3:.1f} km")
print(f"Inclination : {np.degrees(sc.i):.2f} deg")
print(f"RAAN : {np.degrees(sc.raan):.2f} deg")
print(f"Propagator : {sc.propagator_type}")
Semi-major axis : 6928.1 km
Inclination : 97.59 deg
RAAN : 15.96 deg
Propagator : j2
2. Attach a nadir-pointed rectangular sensor¶
RectangularSensor models a pyramidal FOV defined by two independent half-angles in orthogonal planes. Here we use a narrow cross-track half-angle (10°) with a wider along-track half-angle (30°), modelling a pushbroom imager.
[3]:
sensor = RectangularSensor(
theta1_deg=10.0,
theta2_deg=30.0,
body_vector=[0, 0, 1],
)
sc.add_sensor(sensor)
print(f"Cross-track half-angle : {sensor.theta1_deg:.1f}°")
print(f"Along-track half-angle : {sensor.theta2_deg:.1f}°")
Cross-track half-angle : 10.0°
Along-track half-angle : 30.0°
3. Define the Area of Interest¶
[4]:
aoi = AoI.from_geography('Canada', point_density=20_000)
print(f"AoI sample points: {len(aoi)}")
AoI sample points: 644
4. Set up Coverage analysis¶
[5]:
cov = Coverage(
aoi,
[sensor],
el_min_deg=20.0,
sza_max_deg=70.0,
)
5. Run the 90-day simulation¶
[6]:
T_START = EPOCH
T_END = EPOCH + np.timedelta64(90 * 24 * 3600, 's')
print("Computing coverage fraction ...")
frac = cov.coverage_fraction(T_START, T_END, max_step=np.timedelta64(10, 's'))
print(f" Final cumulative coverage : {frac['final_cumulative']:.1%}")
print(f" Mean instantaneous : {frac['mean_fraction']:.1%}")
print("\nComputing revisit times ...")
rev = cov.revisit_time(T_START, T_END, max_step=np.timedelta64(10, 's'))
Computing coverage fraction ...
Final cumulative coverage : 100.0%
Mean instantaneous : 0.0%
Computing revisit times ...
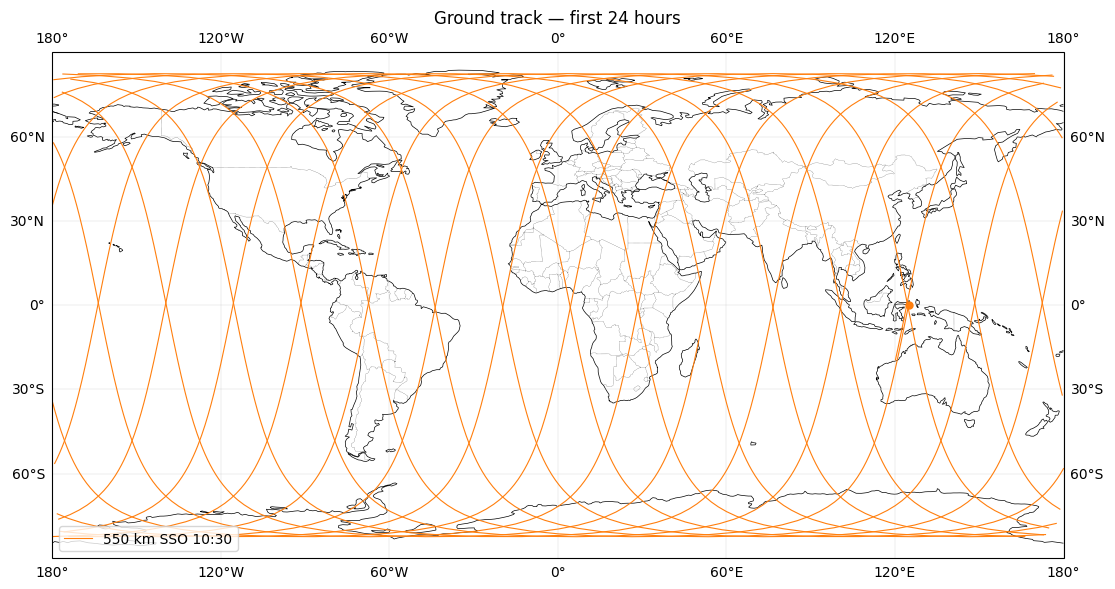
6. Ground track — first 24 hours¶
[7]:
fig = plt.figure(figsize=(14, 6))
ax = fig.add_subplot(1, 1, 1, projection=ccrs.PlateCarree())
plot_ground_track(
sc,
T_START,
T_START + np.timedelta64(24 * 3600, 's'),
ax=ax,
color='tab:orange',
label='550 km SSO 10:30',
linewidth=0.8,
)
ax.set_title('Ground track — first 24 hours')
ax.legend(loc='lower left')
plt.tight_layout()
plt.show()
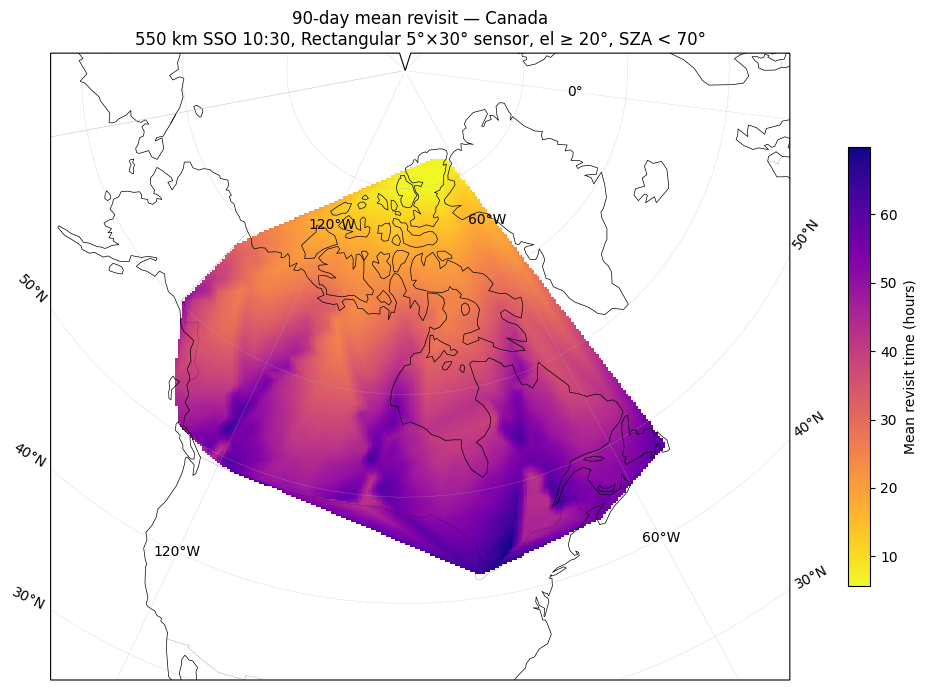
7. Coverage maps over Canada¶
We use a Lambert Conformal Conic projection with the same geometric parameters as EPSG:3347 (Statistics Canada Lambert). We define it manually because Cartopy’s ccrs.epsg(3347) carries restrictive area-of-use bounds from the EPSG registry that clip southern Canada out of the renderable area.
[8]:
canada_proj = ccrs.LambertConformal(
central_longitude=-91.867,
central_latitude=63.391,
standard_parallels=(49, 77),
)
mean_rev_hrs = rev['mean_revisit'] / 3600.0
fig, ax = plt.subplots(
figsize=(12, 7),
subplot_kw={'projection': canada_proj},
)
plot_coverage_map(
aoi,
mean_rev_hrs,
ax=ax,
auto_window=True,
cmap='plasma_r',
colorbar_label='Mean revisit time (hours)',
title='90-day mean revisit — Canada\n550 km SSO 10:30, Rectangular 5°×30° sensor, el ≥ 20°, SZA < 70°',
)
plt.tight_layout()
plt.show()
[9]:
max_rev_hrs = rev['max_revisit'] / 3600.0
fig, ax = plt.subplots(
figsize=(12, 7),
subplot_kw={'projection': canada_proj},
)
plot_coverage_map(
aoi,
max_rev_hrs,
ax=ax,
auto_window=True,
cmap='plasma_r',
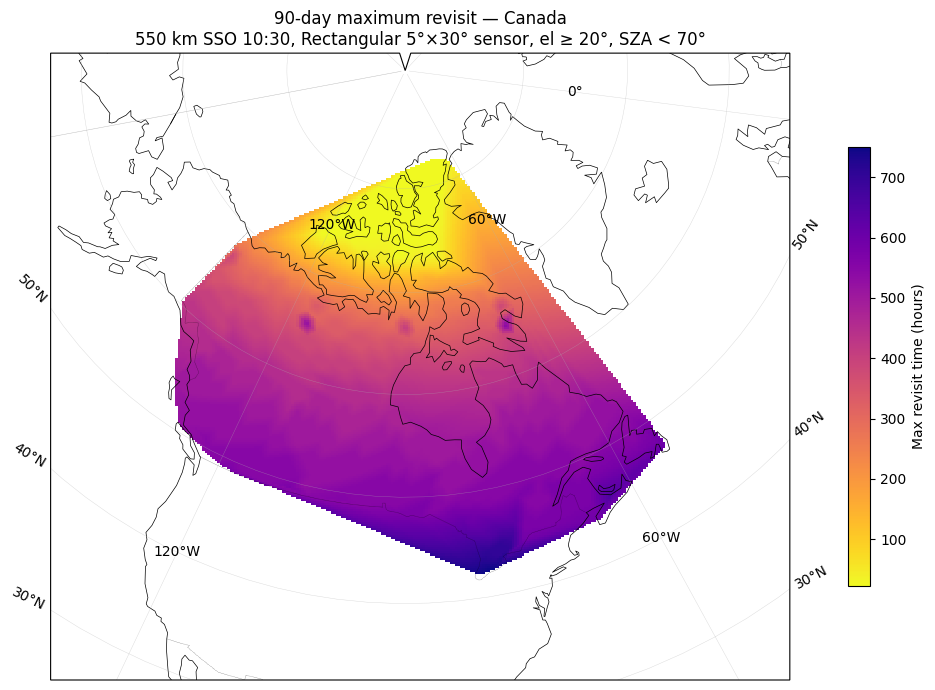
colorbar_label='Max revisit time (hours)',
title='90-day maximum revisit — Canada\n550 km SSO 10:30, Rectangular 5°×30° sensor, el ≥ 20°, SZA < 70°',
)
plt.tight_layout()
plt.show()
8. Summary statistics¶
[10]:
print("=" * 55)
print("90-day coverage summary — Canada")
print("550 km SSO 10:30 | Rectangular 5°×30° sensor")
print("=" * 55)
print(f"Cumulative coverage fraction : {frac['final_cumulative']:.1%}")
print(f"Mean instantaneous coverage : {frac['mean_fraction']:.1%}")
print()
global_mean_hrs = rev['global_mean'] / 3600.0
global_max_hrs = rev['global_max'] / 3600.0
print(f"Global mean revisit time : {global_mean_hrs:.1f} h")
print(f"Global max revisit time : {global_max_hrs:.1f} h")
=======================================================
90-day coverage summary — Canada
550 km SSO 10:30 | Rectangular 5°×30° sensor
=======================================================
Cumulative coverage fraction : 100.0%
Mean instantaneous coverage : 0.0%
Global mean revisit time : 40.5 h
Global max revisit time : 750.4 h